Basic usage
Preparation
- 파일 생성
- Menu Bar → File → New를 눌러 프로젝트를 생성
- Ground plane생성
- Create > Physics > Ground Plane
- 조명추가
- Create > Lights > Distant Light
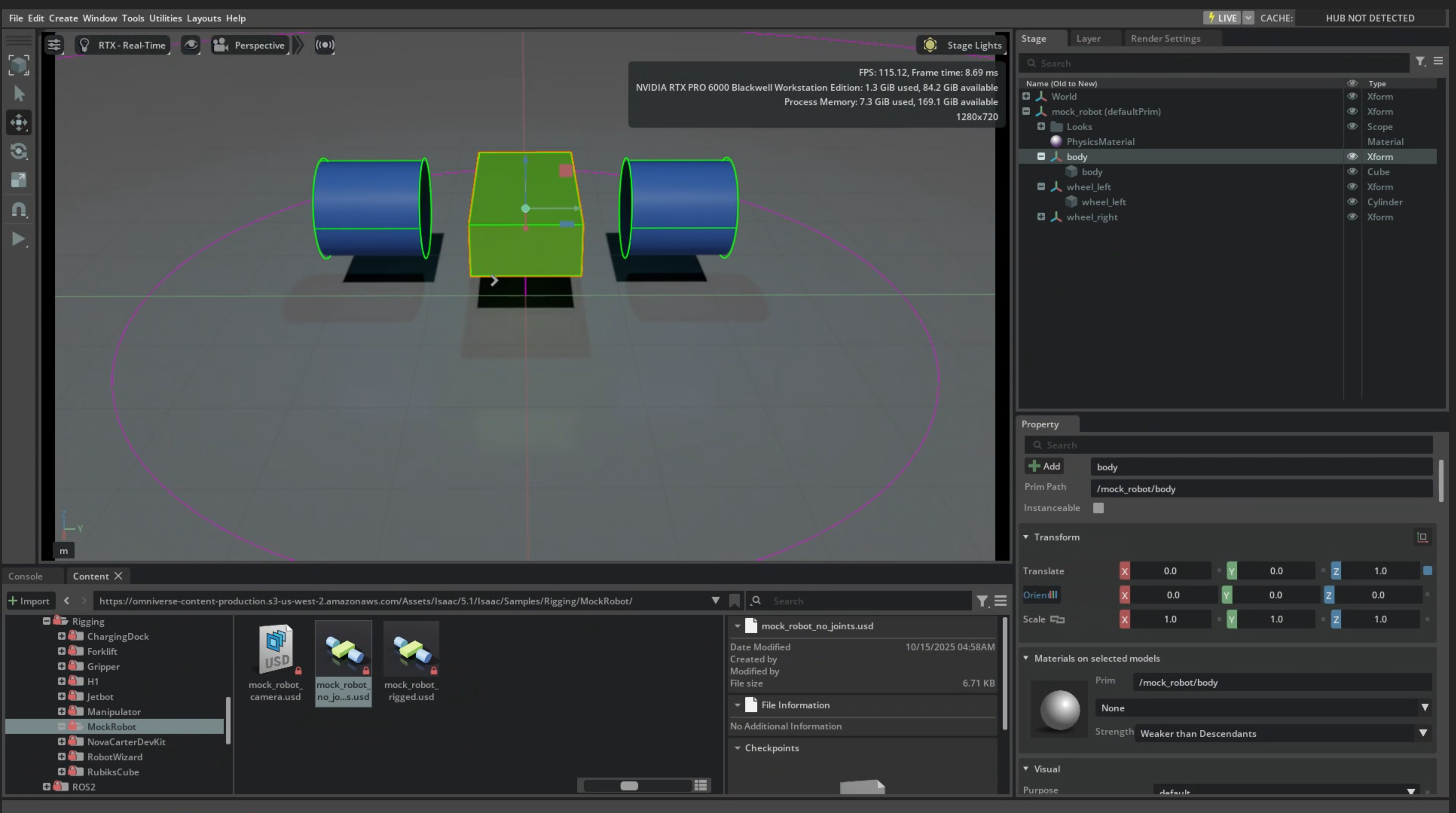
Visual Cube
- Gizmo(큐브) 만들기
- Gizmo(큐브) 조절
- W: 위치이동
- E: 회전
- R: Scale
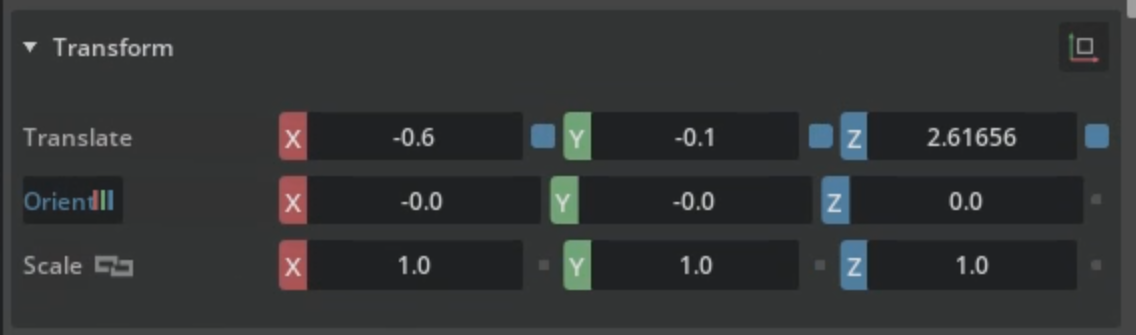
- 우측 Property Bar를 통해서도 기즈모를 미세조정할 수 있으며 파란색 네모박스를 통해 원상복구(초기화) 할 수 있다
- 기즈모에 물리법칙 추가
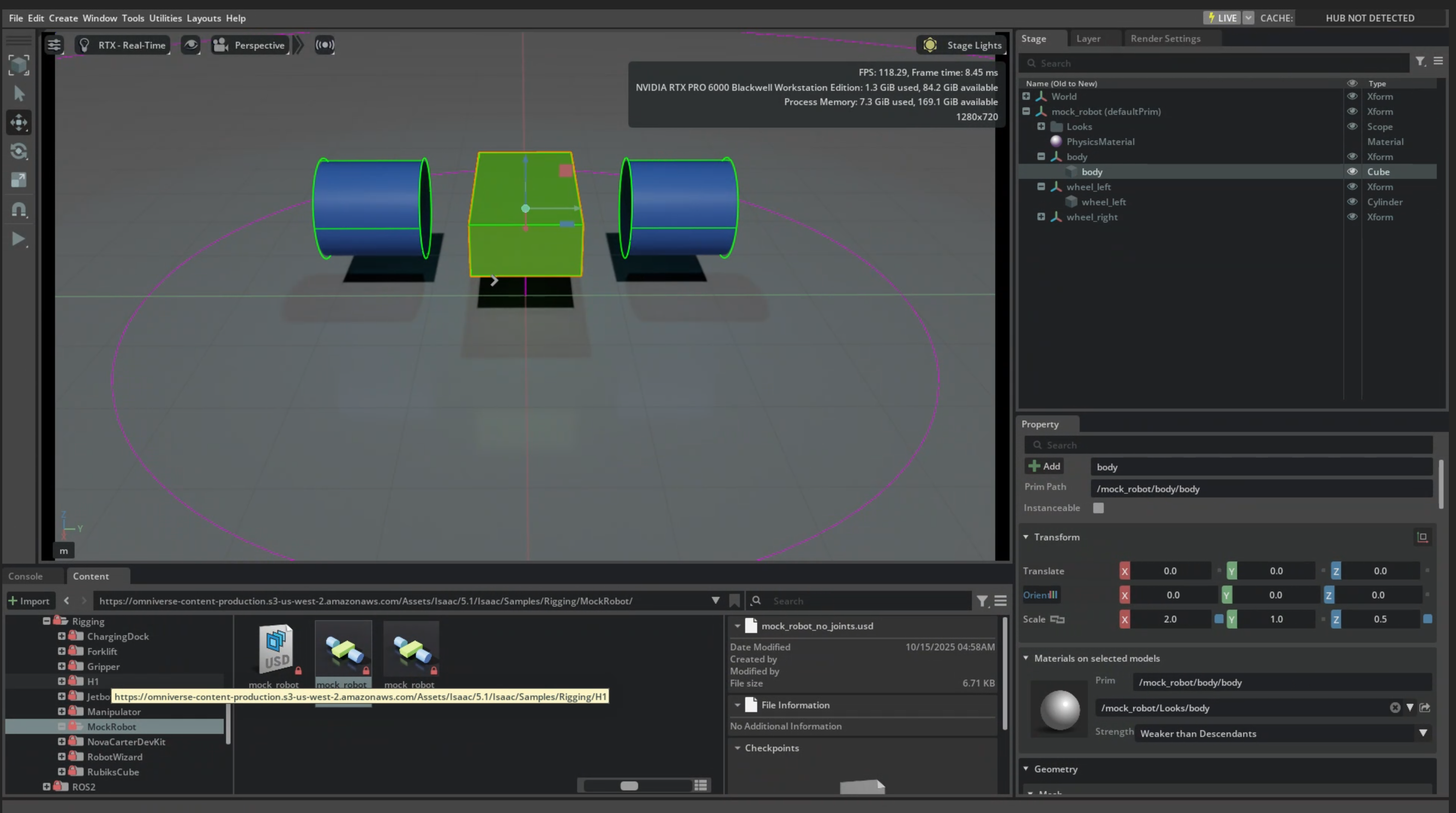
- 큐브를 클릭하고 우측 Property칸에 Add > Physics > Rigid Body with Colliders Preset
- Rigid Body: (강체) 운동방정식 계산
- Colliders: (충돌체) 물리적 충돌을 감지하고 처리하기 위해 오브젝트에 부여하는 보이지 않는 외곽선 또는 영역
Basic Robot
- 새로운 스테이지를 만든다.
- Franka Emika Panda Arm을 만든다.
- Create > Robots > Franka Emika
- Physics Inspector를 통해 로봇을 실시간으로 테스트할 수 있다.
- Tools > Physics > Physics Inspector
- 여기서 Franka를 선택하고 Stage창에서 Graphs → Position_Controller → JointCommandArray를 선택한다.
- OmniGraph
- 로봇의 제어를 블록선도와 같은 시각화형태로 표현한 논리적 흐름도
Keywords
- Stage: 가상세계
- ground plane: 가상세계의 바닥역할
- USD(Universial Scene Description): 가상공간을 설명하는 설계도
- Isaac Sim은 m, Omniverse Kit은 cm, 단위를 사용하여 USD가 100배 틀려 보일 수 있다.
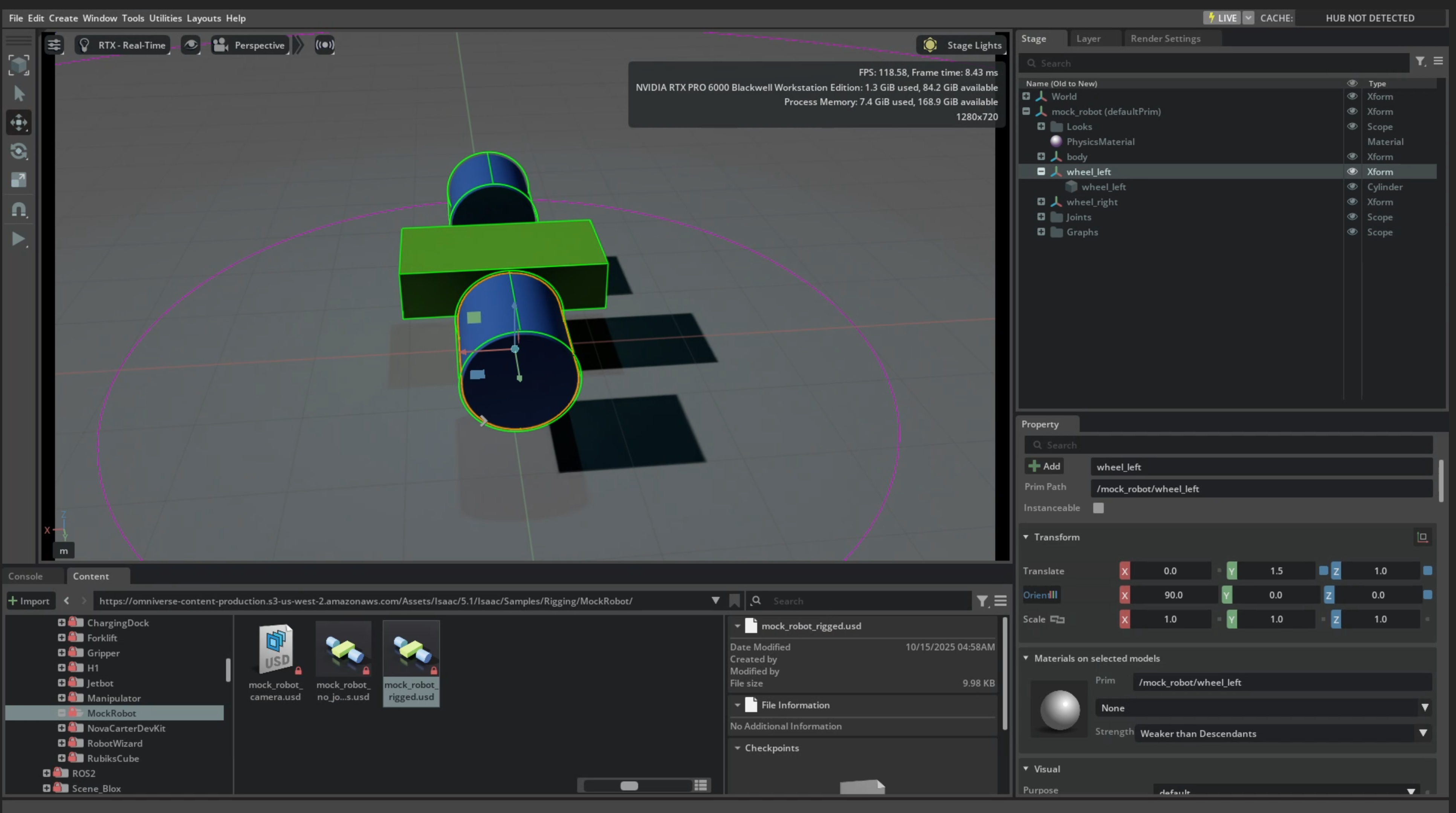
- 회전 명령시 회전 순서는 Z → Y → X축이된다,
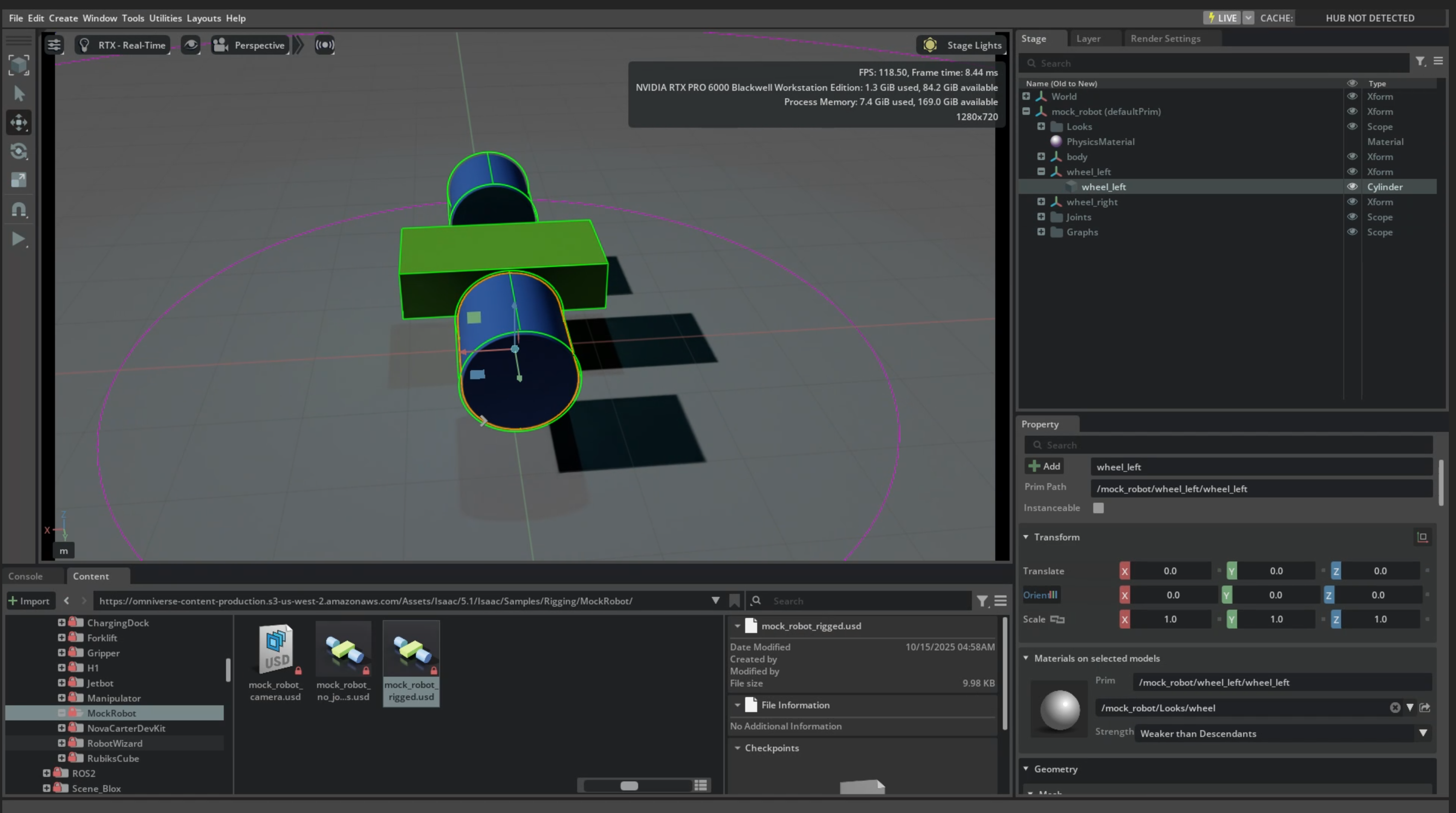
- USD Prim(Primitive): 가상세계의 원시적인 어떤 것으로 가상세계에 객체를 하나 추가한다는 것.
Stage
└── /World
└── Cube ← 새 USD Prim
- Xform = Transform
- Attributes:
- Translate (이동)
- Rotate (회전)
- Scale (크기)
- 위 속성을 담는 USD Prim 타입이 Xform
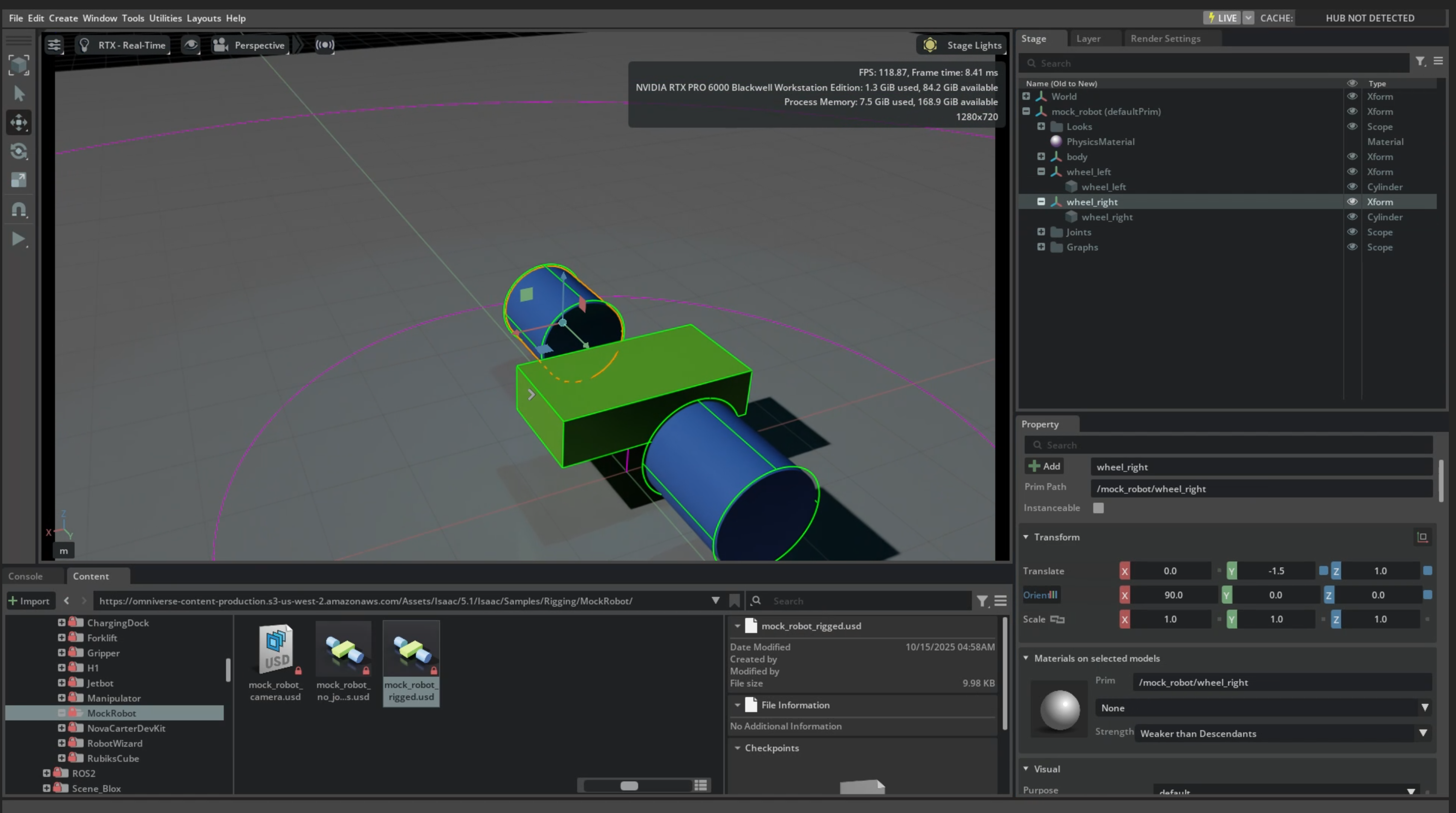
/World
└── MyObject (Xform) ← 기준 좌표계
├── Cube
├── Cylinder
└── Sphere
MyObject만 움직이면- Cube, Cylinder, Sphere가 같이 움직임
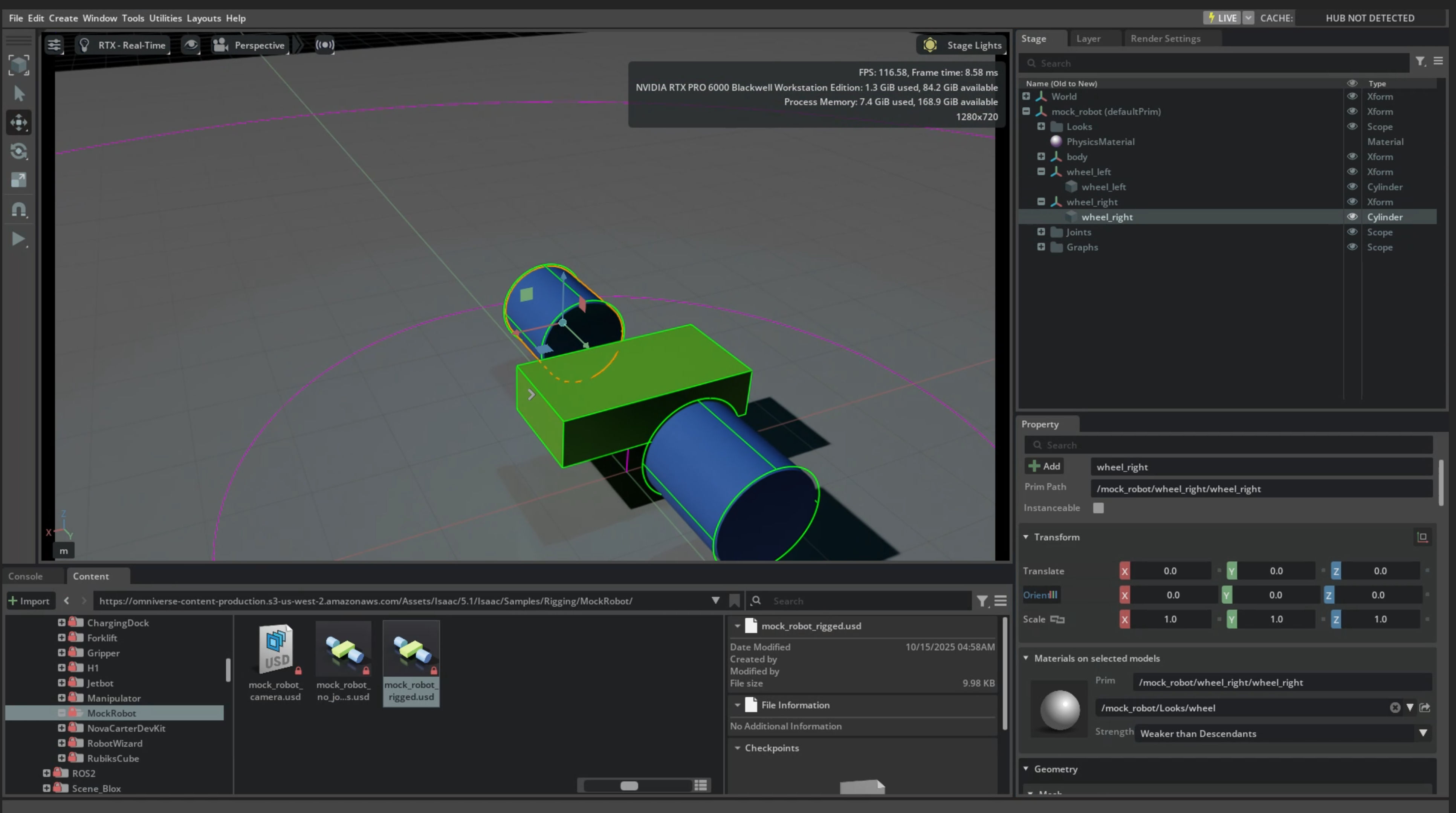
- Revolute Joint: 회전 관절 두 물체가 특정 축을 중심으로 회전 운동만 할 수 있도록 연결하는 관절
- Articulation Root: Articulation(관절) root(뿌리)라는 뜻으로 여러 개의 Rigid Body를 조인트로 연결된하나의 로봇 물리 시스템으로 묶는 최상위 기준 노드
- defaultPrim: World밖으로 꺼내서 defaultPrim으로 만든다는 것은 로봇 자체의 파일을 만드는 것으로 나중에 환경을 구성했을 때 언제든지 꺼내 쓸 수 있게 할 수 있다.


Comment