
서론
- Mark Sandler, Andrew Howard, Menglong Zhu, Andrey Zhmoginov, Liang-Chieh Chen; Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2018, pp. 4510-4520,
MobileNetV2: Inverted Residuals and Linear Bottlenecks - 위 논문에 대해서 리뷰하고
Depthwise Separable Convolution,Linear Bottlenecks,Inverted Residuals에 대해서 자세히 살펴본다. - 이 논문은 2018년도 4월에 Conference on Computer Vision and Pattern Recognition(CVPR)에서 발표되었다. CVPR은 컴퓨터 비전 분야의 가장 유명한 학술대화 중 하나다.
목차
- Abstract
- Introduction & Related Work
- MobileNetV1
- Linear Bottlenecks (1)
- Linear Bottlenecks (2)
- Inverted Residuals
- Untitled
- The Max Number of Channels/Memory(KB)
- Experiments - ImageNet Classification
- Experiments - Object Detection(SSDLite)
- SSD300 : 300x300 Input Size
- MobileNetV2 코드리뷰
Abstract
1. we describe a new mobile architecture, mbox{MobileNetV2}, that improves the state of the art performance of mobile models on multiple tasks and benchmarks as well as across a spectrum of different model sizes.
- 본 논문은 여러 모델 크기에 따라서 성능을 측정하고 모바일 모델의 SOTA를 달성했다.
2. Is based on an inverted residual structure where the shortcut connections are between the thin bottleneck layers.
- Bottleneck에 얇은 layer사이에 short connection을 적용한 도치된 Residual Structure를 갖는다.
3. The intermediate expansion layer uses lightweight depthwise convolutions to filter features as a source of non-linearity. Additionally, we find that it is important to remove non-linearities in the narrow layers in order to maintain representational power.
- 비선형성을 적용하여 feature를 filtering하기 위해 expansion layer를 사용하고 추가적으로 narrow layer에 representational power를 유지하기 위해 비선형성을 제거한다.
4. We measure our performance on mbox{ImageNet}~cite{Russakovsky:2015:ILS:2846547.2846559} classification, COCO object detection cite{COCO}, VOC image segmentation cite{PASCAL}.
- classification인 경우 ImageNet Dataset
- Object Detection인 경우 COCO Dataset
- Segmentation인 경우 VOC Dataset
Introduction & Related Work
background Research
- modern
state of the art networks require high computationalresources beyond the capabilities of many mobile and embedded applications. - 현대 최신 모델들은 임베디드 장치가 수용할 수 있는 리소스 한계를 넘는 많은 연산량을 요구하는 자원을 필요로 한다.
Recent Research
- recently, opened up a new direction of bringing optimization methods including genetic algorithms and reinforcement learning to
architectural search. - However one drawback is that the resulting networks end up
very complex. - 최근에는 진화 알고리즘, 강화학습등을 통한 NAS기술을 도입해 최적화하는 기법이 적용되고 있다.
- 그러나 여전히 네트워크가 복잡하다는 단점이 있다.
Propose
- we pursue the goal of developing better intuition about how neural networks operate and use that to guide the
simplest possible networkdesign. - 우리는 신경망이 어떻게 동작하는지에 대해 더 나은 직관을 소개하고 가벼운 네트워크를 설계하는 방법에 대해 소개한다.
Related Paper
- Andrew G. Howard, et al.,
“Mobilenets: Efficient convolutional neural net- works for mobile vision applications” - Xiangyu Zhang, et al.,
“ShuffleNet: An Extremely Efficient Convolutional Neural Network for Mobile Devices”
MobileNetV1
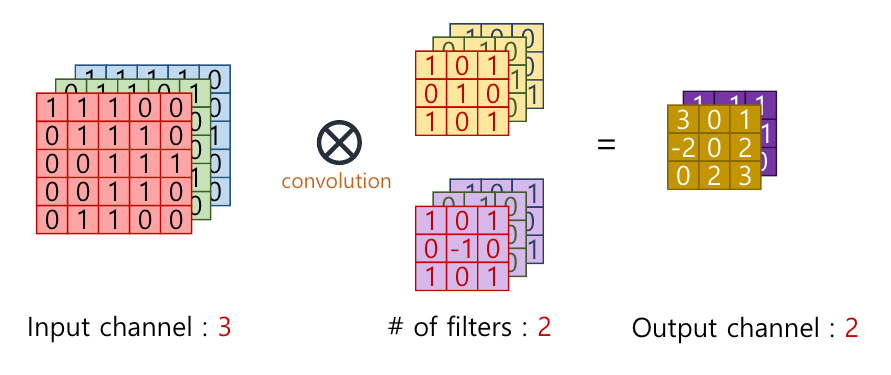
- Convolution Operation
input channel의 수=filter channel의 수,filter의 갯수=output channel 수
- feature map 크기 계산방법\[O_h = floor(\frac{I_h - K_h+2P}{S}+1) \\Ow = floor(\frac{I_w - K_w+2P}{S}+1)\]
floor: 소수점 발생시 소수점 이하는 버림
- \(I_h\) : 입력의 높이
- \(I_w\) : 입력의 너비
- \(K_h\) : 커널의 높이
- \(K_w\) : 커널의 너비
- \(S\) : 스트라이드
- \(O_h\) : feature map 높이
- \(O_w\) : feature map 너비
Padding = “same” : input shape과 output shape이 동일하도록 padding값이 들어감
- padding=“valid”(padding=0): 3x3 kernel의 경우 input_shape이 (224, 224) –> (222, 222)로 출력됨
- padding=“same”(padding=1): 3x3 kenrel의 경우 input_shape이 (224, 224) –> (224, 244)로 출력됨)
Convolution Operation

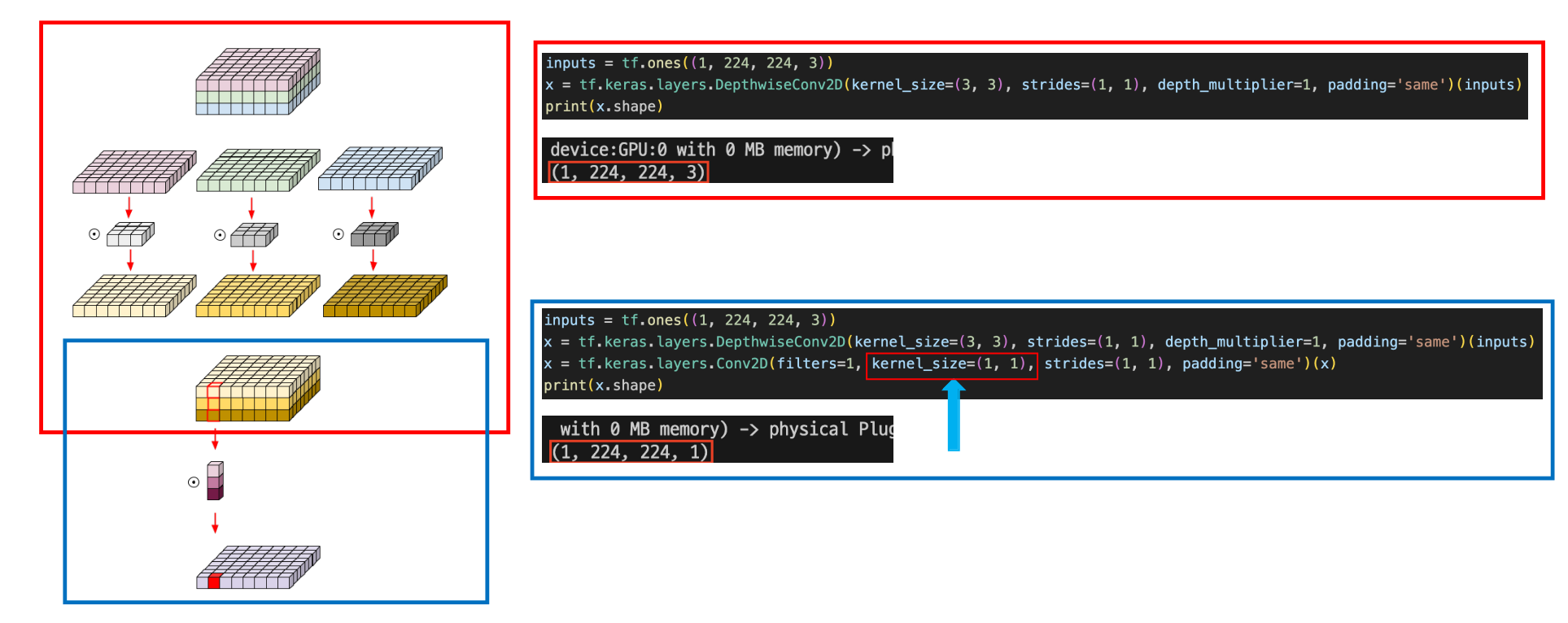
Depthwise Separable Convolution (depthwise conv + pointwise conv)
- Depthwise Separable Convolution =
Depthwise Conv + Pointwise Conv - Depthwise Conv : input feature map에 대해 output feature map의 채널수가 동일하다.
Computational Cost
- \(𝐷_𝐹\): height/width of feature map
- \(𝐷_𝐾\): height/width of filter
- \(M\): channel of Input Tensor
- \(N\) : channel of ouput Tensor(Number of filters)
- Standard Convolutions computational cost
- \(D_F\times D_F\times M \times D_K \times D_K \times N\)
- \(D_F\times D_F\times M \) 은 각 채널에 대한 계산 비용, \(D_K \times D_k \times N\)번 일어난다.
- Depthwise Separable Convolution computational cost
- \(D_F\times D_F\times M \times D_K \times D_K + D_F \times D_F \times M \times N\)
- Reduction in computations(Depth Conv / Standard Conv)
- \(\frac{1}{N} + \frac{1}{D_K^2}\)
- \(N\)은 ouput_channel의 크기(=필터의 갯수)이고 \(D_K\)는 필터의 크기(shape) \(N\)이 \(D_K\)보다 일반적으로 훨씬 큰 값이므로 \(\frac{1}{D_k^2}\) 값이 되어 \(\frac{1}{D_k^2}\)배 만큼 계산이 줄었다고 볼 수 있다.
- 이 때, \(D_K\)는 보통 3이므로 1/9배 정도 계산량이 감소함
Linear Bottlenecks (1)
- Informally, for an input set of real images, we say that the set of layer activations forms a “
manifoldof interest” - Real Image를 input으로 받았을 때, Neural Network의 어떤 layer들을 통해 manifold를 형성한다.
- It has been long
assumedthat manifolds of interest in neural networks could be embedded inlow-dimensional subspaces. - manifold는 Neural Network에서 input의 feature들이 저차원의 subspace로 맵핑될 수 있다는 가정이 있다.
- What is manifold?
- In neural networks, the concept of "manifold" refers to the idea that networks typically include an
encoder component that compresses high-dimensional data into a lower-dimensional space.This process involves performing feature extraction. - Neural Networks는 일반적으로 학습 과정에서 고차원의 데이터를 저차원으로 압축하는 encoder와 같은 역할을 하는데 이때 feature extraction을 하게된다.
- 고차원의 데이터가 저차원으로 압축되면서 특정 정보들을 잘 표현하는 저차원의 부분공간(subspace)로 맵핑되는데 이러한 공간을 manifold라고 한다.
- In neural networks, the concept of "manifold" refers to the idea that networks typically include an
- We have highlighted two properties that are indicative of the requirement that the manifold of interest should lie in a low-dimensional subspace of the higher-dimensional activation space:
- manifold는 고차원의 데이터를 저차원의 subspace로 맵핑이 가능하다는 것에 대해서 다음 두가지를 강조한다.
- If the manifold of interest remains non-zero volume after ReLU transformation,
it corresponds to a linear transformation. - 만약 ReLU를 통과 한 어떤 feature가 0보다 컸다면 ReLU의 특성상 identity Matrix를 곱한 것과 같아서 단순한 linear transformation하다고 볼 수 있다.
- ReLU is capable of preserving complete information about the input manifold, but
only if the input manifold lies in a low-dimensional subspace of the input space. - 네트워크를 거치면서 feature들이 저차원으로 매핑되는 연산이 계속되는데, 양수에 대해서는 ReLU는 그대로 전파하는 linear transformation이므로 manifold의 정보를 잘 보존하고 있다고 볼 수 있다.
- If the manifold of interest remains non-zero volume after ReLU transformation,
- assuming the manifold of interest is low-dimensional we can capture this by inserting linear bottleneck layers into the convolutional blocks.
- 즉, 저차원으로 매핑하는 bottleneck architecture를 만들 때, linear transformation역할을 하는 linear bottlenect layer를 만들어서 차원은 줄이되 manifold 상의 중요한 정보들은 그대로 유지해 보자는 것이 컨샙이다.
Linear Bottlenecks (2)
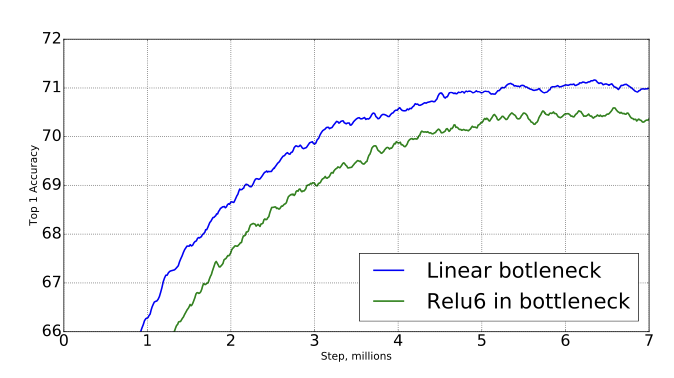
- 실제로 실험을 하였는데 bottlenect layer를 사용하였을 때 ReLU를 사용하면 오히려 성능이 떨어진다는 것을 확인했다.
- However, the output of the projection layer does not have an activation function applied to it. Since this layer produces low-dimensional data, the authors of the paper found that using a non-linearity after this layer actually destroyed useful information.
- projection layer는 activation function을 사용하지 않는데, 이 layer는 low-dimensional data를 가지고 있기 때문에 이후 비선형성 활성화함수를 사용하면 유용한 정보를 손실한다는 것을 발견했다.
- 아마 Relu가 0이상의 값에 대해서는 그대로 전파하지만 0이하의 값은 전부 0으로 고정시킴으로 정보손실이 잃어나 학습에 영향을 주는 것이 아닐까 추측한다.
Inverted Residuals
- Inspired by the intuition that
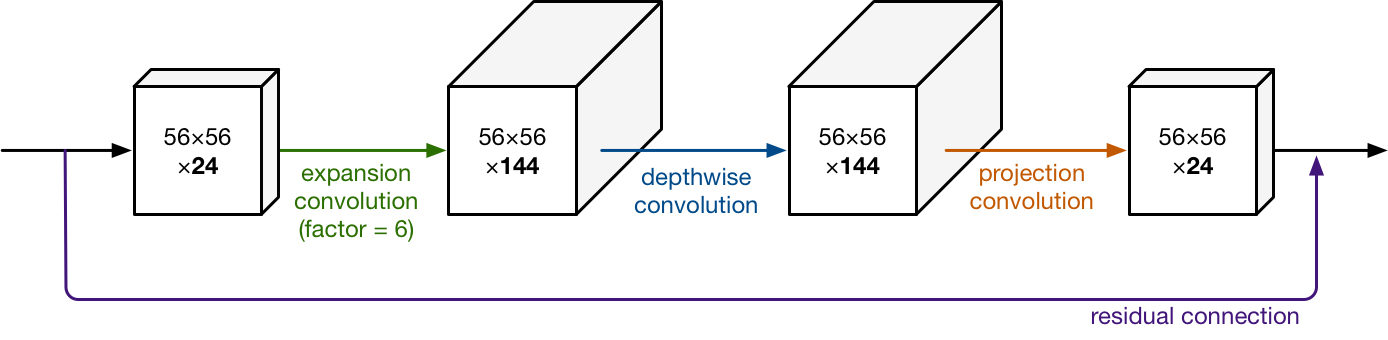
the bottlenecks actually contain all the necessary information,while an expansion layer acts merely as an implementation detail that accompanies a non-linear transformation of the tensor,we use shortcuts directly between the bottlenecks. - Expansion layer는 feature map의 non-linear transformation을 수행하고 Bottlenecks(빗금친부분)는 필요한 정보만 압축해 저장하고 있다라는 직관에 영감을 받아 skip connection을 사용하면 필요한 정보를 더 깊은 layer까지 잘 전달 할 것이라는 기대를 할 수 있다. 그리고 기존 Residual block구조에서 도치된 형태로사용함으로써 메모리 사용량을 줄일 수 있다.
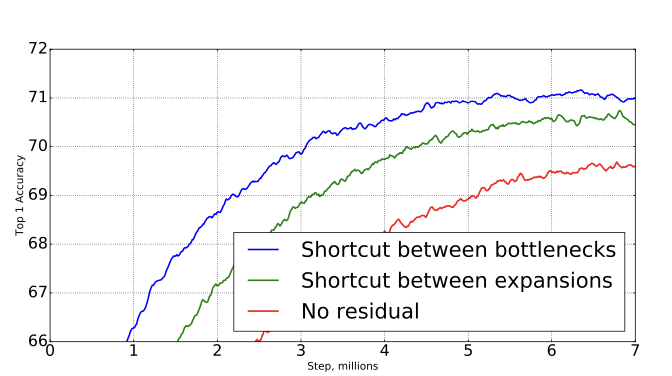
- (오른쪽 이미지 표) narrow layer에 residual connection을 적용한 것, residual connection을 expansion layer에 적용한 것, residual connection을 아이에 적용하지 않은 것에 대한 성능차이를 보여주는 표이다.
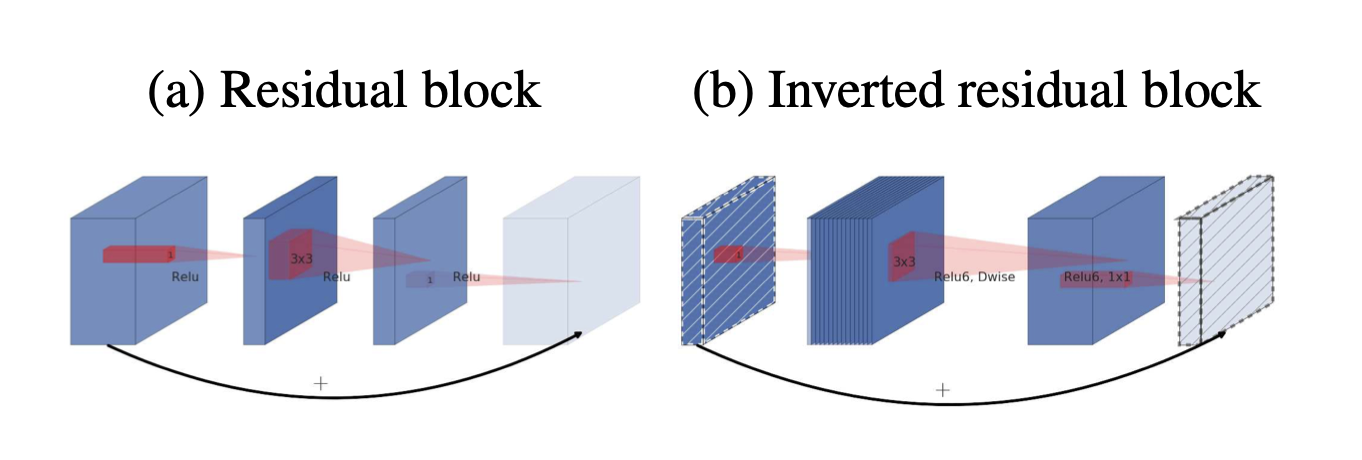
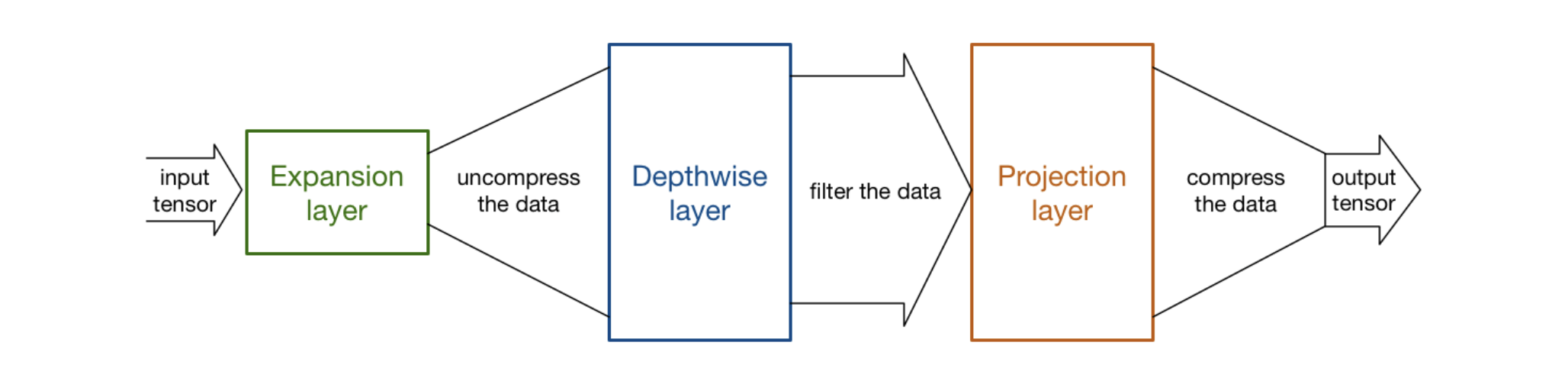
- feature map이 들어오면 1x1 conv를 통해 dimension을 expand시키고 feature를 filtering하기 위한 3x3 depthwise conv연산을 합니다. 마지막에는 1x1 conv을 통해 skip conntection과 합쳐지기 위해 원래의 dimension으로 복원하게 된다.
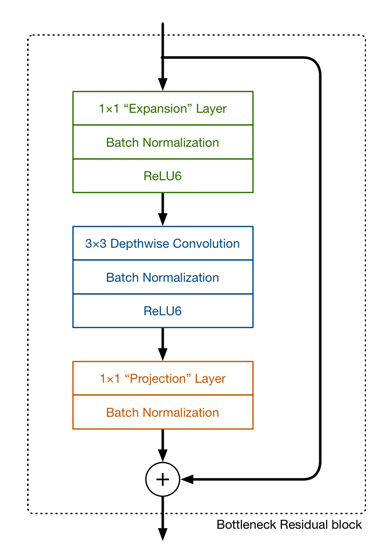
Bottleneck Residual Blocks
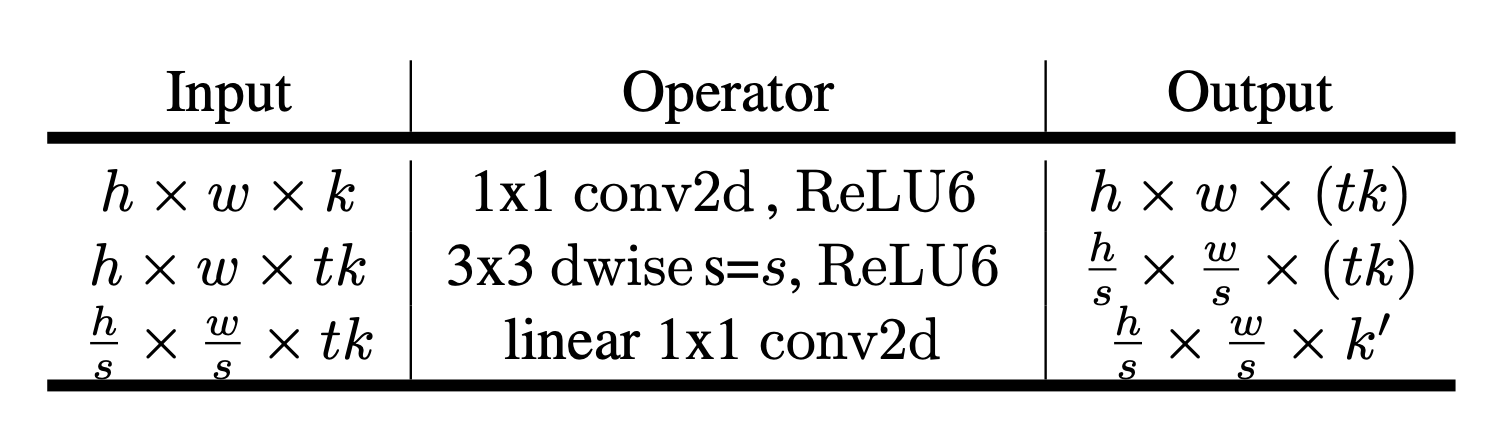
- The basic building block is a bottleneck depth-separable convolution with residuals.
- 입력이 Narrow상태로 들어오면
- 1x1conv(expansion layer)를 통해 채널을 키운다.
- BatchNorm -> ReLU6
- 3x3 depthwise conv를 통해 feature filtering
- BatchNorm -> ReLU6
- 1x1conv를 사용해 채널 수를 다시 복원(줄인다)
- skip connection을 사용한다.
- expansion factor t를 사용하여 filter에 곱해서 채널을 확장시킵니다. 이 논문에서는 t를 6으로 사용하고 있으며 논문에서는 5~10정도를 사용하는것을 추천한다.
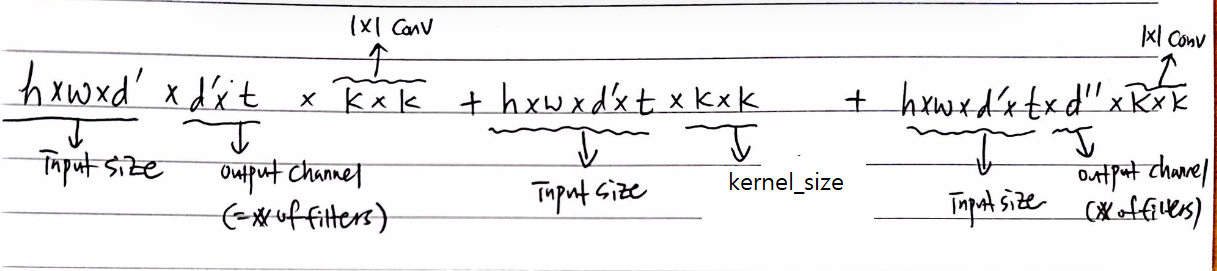
Number of Operations(Multiply-add)
- Input size: \(h \times w\)
- Expansion factor: \(t\)
- Kernel size: \(k\)
- Input channels: \(d'\)
- Output channels: \(d''\)
- The total number of multiply add required is
The Architecure of MobileNetV2
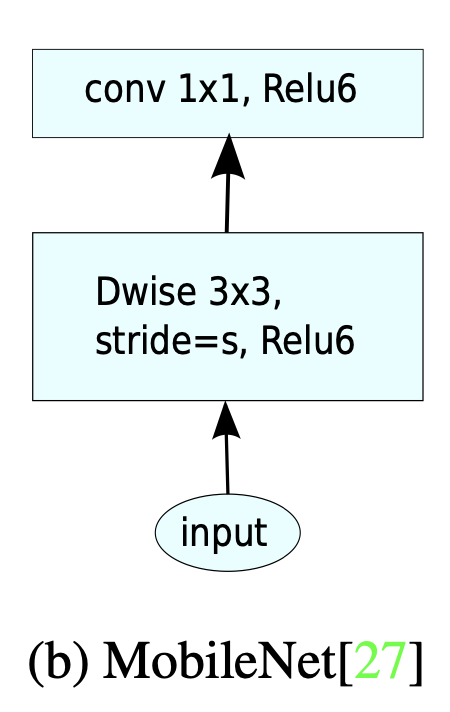
MobileNetV1
- MobileNetV1에서의 block은 크게 2개의 layer로 구성되어 있다.
- 첫번째 layer인 depthwise convolution은 각 Input channel에 single convolution filter를 적용하여 네트워크 경량화를 하는 작업이였다.
- 두번째 layer는 pointwise convolution인 1x1 convolution에서는 depthwise convolution의 결과를 pointwise convolution을 통하여 다음 layer의 Input으로 합쳐주는 역할을 한다.
- Activation function으로 ReLU6를 사용하여 block을 구성하였다.
- 참고로 ReLU6는 min(max(x, 0), 6) 식을 따르고 음수는 0으로 6이상의 값은 6으로 수렴시킨다.
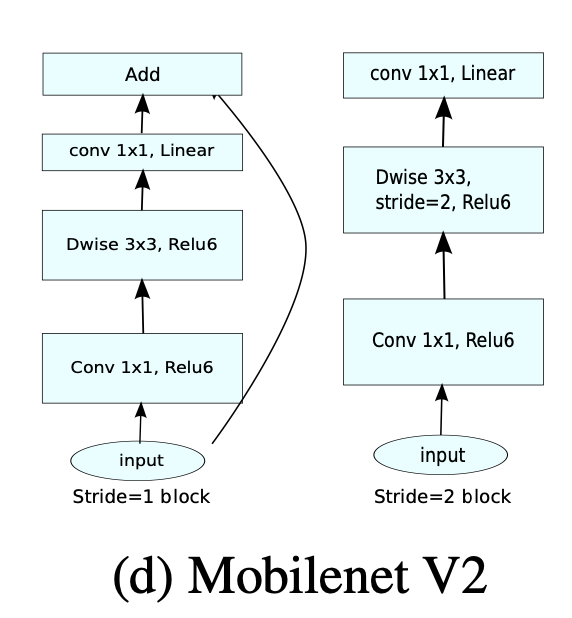
MobileNetV2
- MobileNetV2에는 크게 2가지 종류의 block이 있다.
- 2가지 종류의 block은 3개의 layer를 가지고 있습니다.
- 두 종류의 block 모두 첫 번째 layer는 1x1convolution + ReLU6 입니다.
- stride = 1 경우
- depthwise convolution, stride=1로 설정한다.
- stride = 2 경우
- depthwise convolution, stride=2로 설정되어 downsizing 된다.
- 세번째 layer에서는 pointwise(1x1) convolution이 적용된다.
- 단, 여기서는 activation function이 없다. 즉, non-linearity를 적용하지 않은 셈이다.
- stride가 2가 적용된 block에는 skip connection이 없다.
- stride 2를 적용하면 feature의 크기가 반으로 줄어들게 되므로 skip connection 또한 줄어든 크기에 맞게 맞춰져야 하는 문제가 있어서 skip connection은 적용하지 않은 것으로 추정된다.
MobileNetV2 - Not applied Residual connection
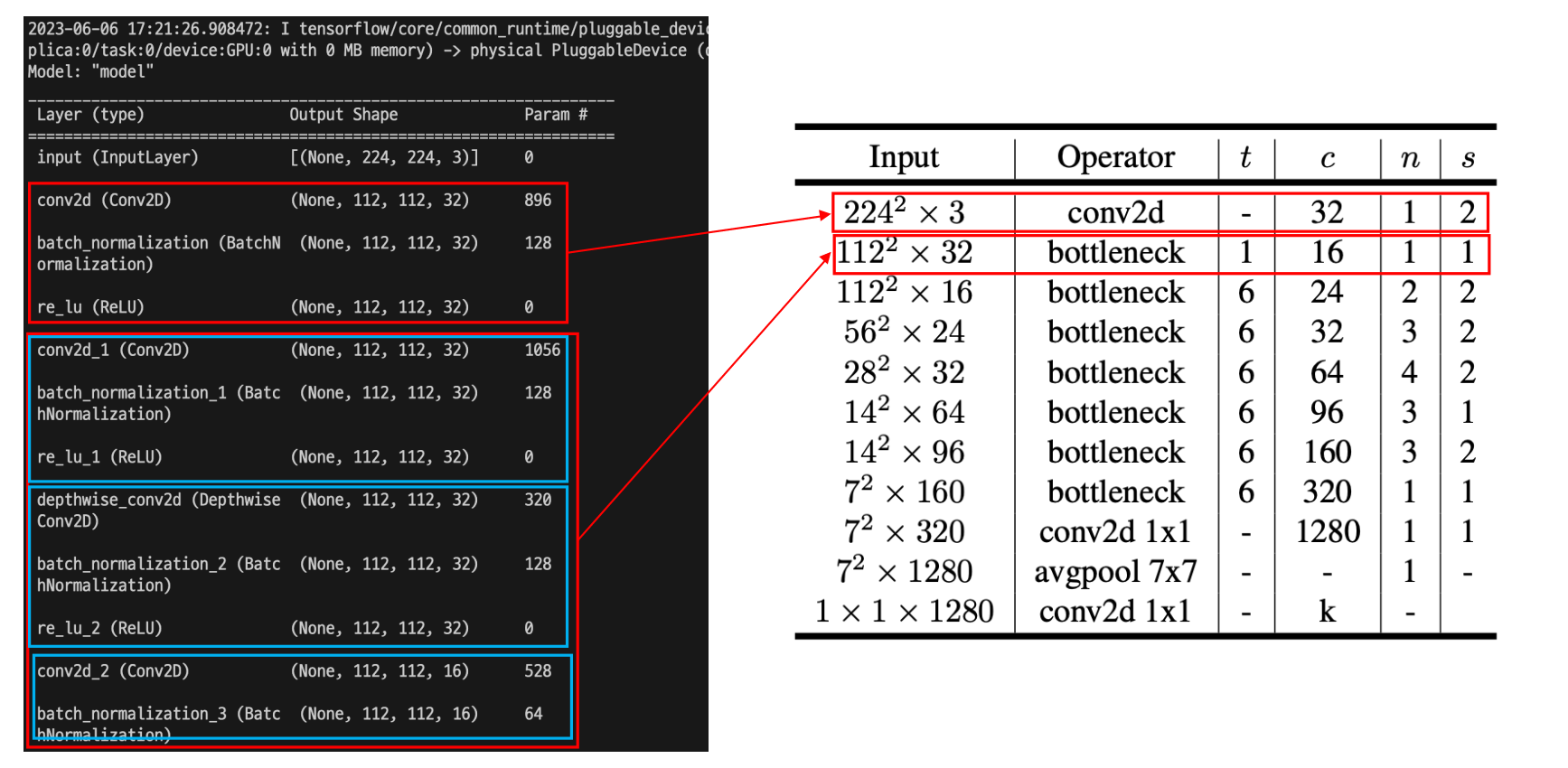
- 처음 빨간 네모박스는 일반 Conv2d를 진행
- bottleneck부분에서는 expansion–> Depthwise –> projection 순으로 진행
- residual connection은 stride=1이고 input, output의 shape이 같은 경우에만 해주는데 해당 네모박스 부분은 다르기 때문에 하지 않는다.
- (None, 112, 112, 3) ≠ (None, 112, 112, 64)
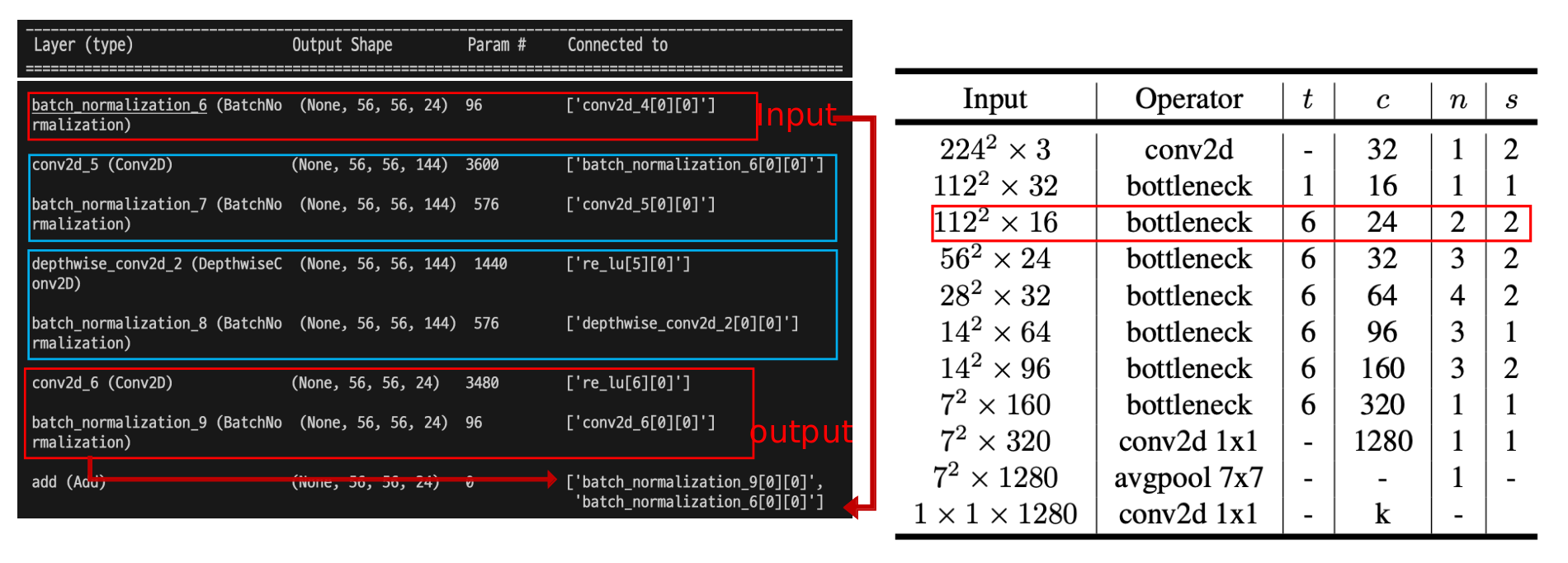
MobileNetV2 - Applied Residual connection
- 해당 부분은 residual connection을 하는 레이어인데, s=2인데도 불구하고 residual connection이 존재하는 이유는 [t=6, c=24, n=2, s=2] n=1일때는 s=2로 가져가지만 n=2일때는 s=1로 코드상에 설정되어 있다.
The Max Number of Channels/Memory(KB)
- Our primary network (width multiplier 1, 224 × 224), has a computational cost of 300 million multiply-adds and uses 3.4 million parameters.
- 기본 network에서는 width multiplier가 1이고 이미지 크기는 224, 224로 한다.
- 이렇게 설정했을 경우 3억(300million)의 계산량(multiply-adds) and 340만개(3.4 million)의 parameter를 사용한다.
- Resolution Multiplier는 Input이미지를 일정한 비율로 줄인다.
- width multiplier는 layer의 채널수를 일정 비율로 줄이는 역할을 한다. 기본이 1이며 만약 0.5인경우 절반으로 줄인다.(0~1 사이의 실수로 설정된다)
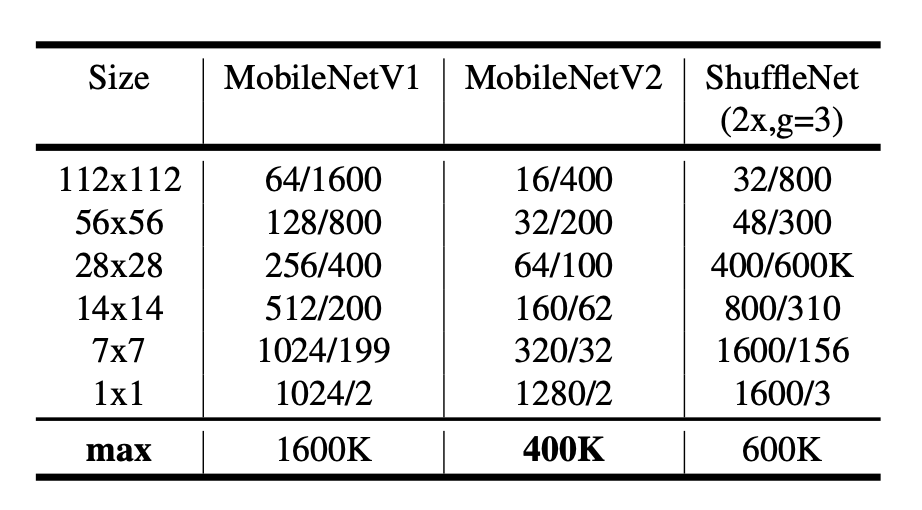
(이미지 - 표)
- 위 테이블에서는 각 input_size에 따른 mobilenet, mobilenet v2, shufflenet에 대한 채널의 수/메모리(Kb 단위)의 최대 크기를 기록하였다.
- 논문에서는 400kilobyte mobilenet v2의 크기가 가장 작다고 설명하고 있다.
Experiments - ImageNet Classification
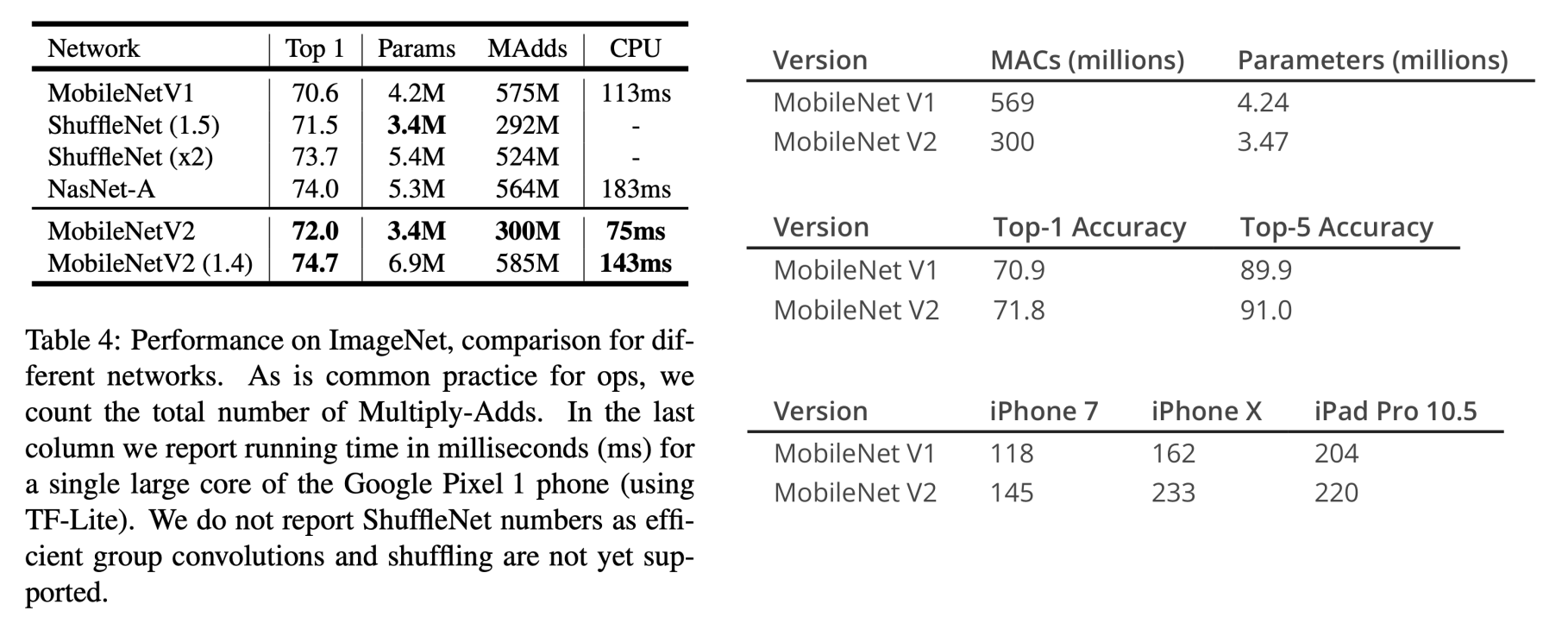
- 왼쪽 표는 Google Pixel 1에서 TF-Lite로 변환해 시간과 정확도에 대해서 측정한 지표이다.
- MBV2
- parameter: 340만개(=3.4M)
- MAdds: 3억개(=300M)
- 오른쪽 첫번째 표는 어떤 웹사이트에서 발견건데 학습에 필요한 parameter와 계산량의 관점에서 본 표이다.
- 224x224 RGB single Image에 대한 MBV1, MBV2에 대한 연산량과 파라미터 수를 보여줍니다.
- 오른쪽 두번째 표는 ImageNet classification dataset으로 측정된 정확도이다.
- 오른쪽 세번째 표는 모바일 기기의 CPU+GPU를 활용해 측정한 표이다(단위 224x224 image를 연속적으로 넣었을 때의 Maximum FPS)
Experiments - Object Detection(SSDLite)
We replace all the regular convolutions with depthwise separable convolutions (depthwise followed by 1 × 1 projection) in SSD prediction layers.
- SSD Network의 bbox정보를 얻는(prediction layer쪽의) 3x3convolution layer를 전부 depthwise seperable convolution으로 교체하여 연산량을 줄였다. 결과 또한 연산을 줄였는데도 성능이 비슷하다.
Parameter
SSD(기본)
- Params: 1480만개(=14.8M)
- MAdds: 12억개(1.2B)
SSD Lite(Conv → Depthwise Separable Conv)
- Params: 210만개(=2.1M)
- MAdds: 3억5천만개(=0.35B)
Results
MNetV2+SSDLite
- Params: 430만개(=4.3M)
- MAdds: 8억개(=0.8B)
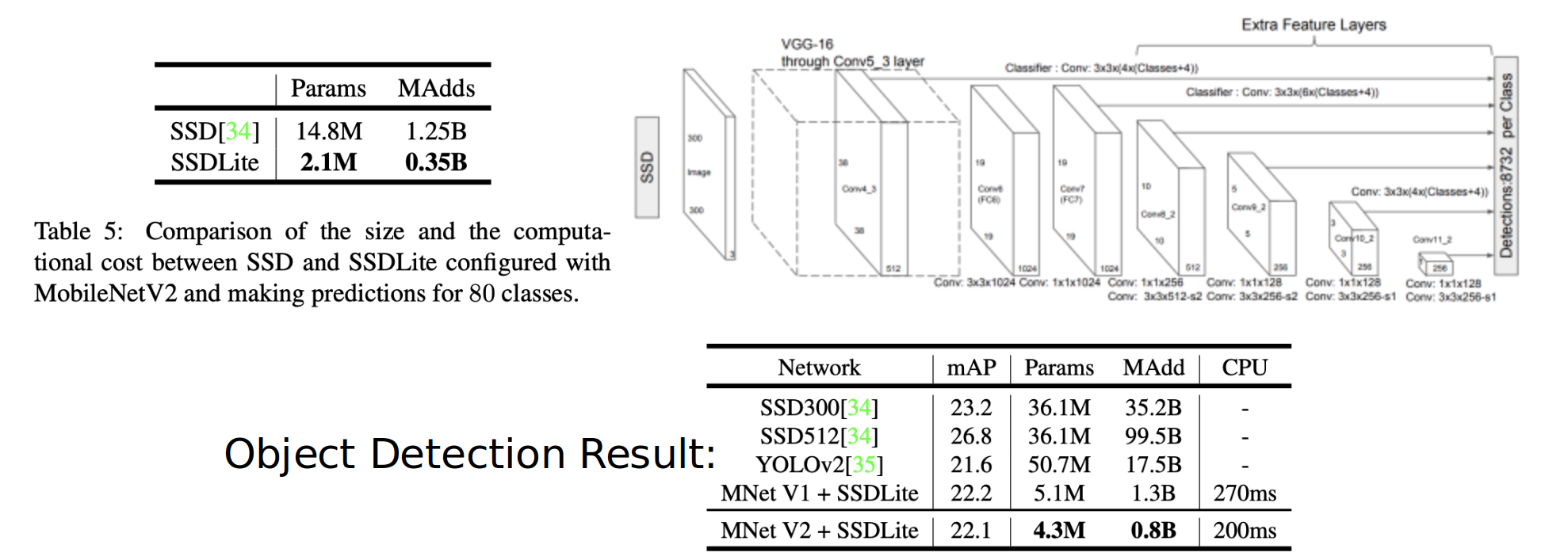
- SSD300 : 300x300 Input Size
- SSD512 : 500x500 Input Size
- MNetV1+SSDLite : MobileNetv2를 backbone으로 한 SSD Lite
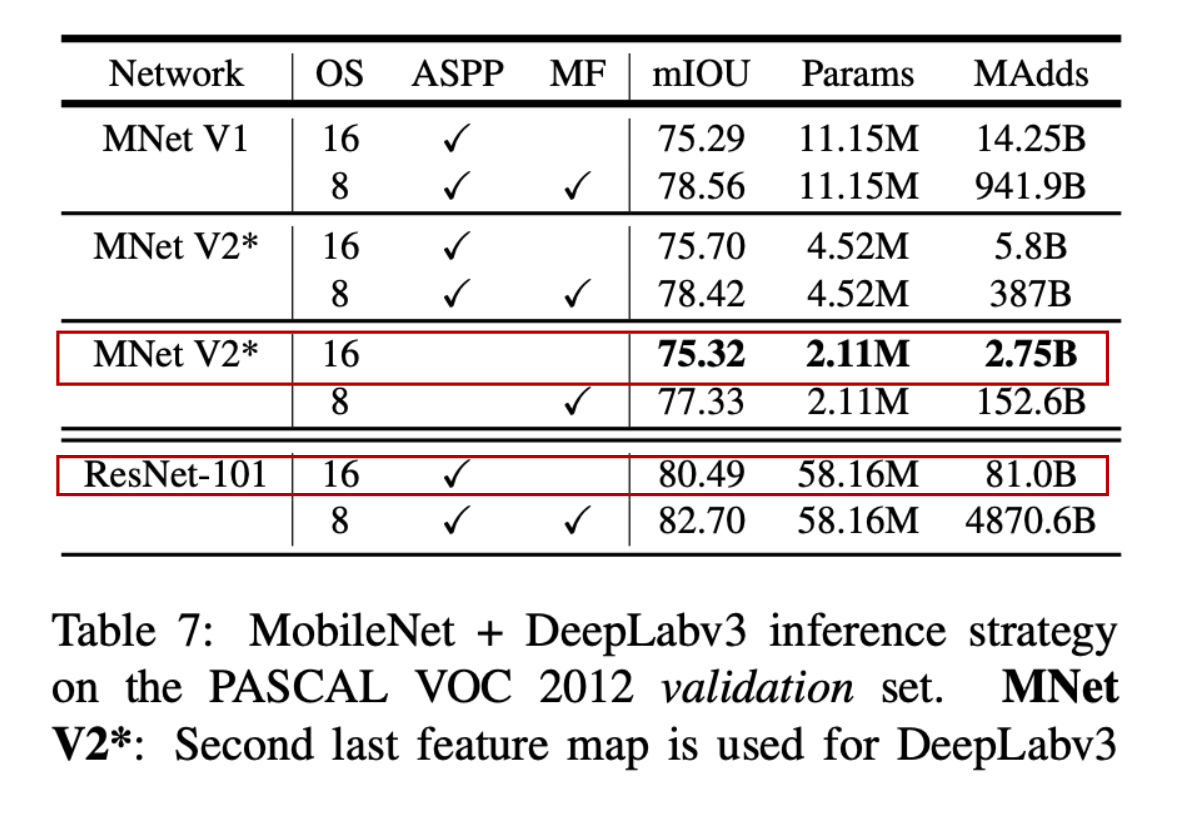
Experiments - Segmentation Results
MobileNetV2
- Parameter: 211만개(2.11million == 2,110,000)
- MAdds: 27억5000만개(2.75billion == 2,750,000,000)
ResNet-101
- Parameter: 5816만개(58.11million == 58,160,000)
- MAdds: 810억개(81.0billion == 81,000,000,000)
OS는 Output Stride의 약자로 해상도 비율을 나타낸다.
- 예를 들어, 네트워크가 Input Stride 1로 시작해서 여러 Convolutional Layer를 통과하며, Stride 2인 Max Pooling Layer를 두 번 통과했다면, 최종 Output Stride는 4가 됩니다. 이는 출력 특성 맵의 한 픽셀이 입력 이미지의 4x4 픽셀 구간에 해당한다는 의미다.
- Output Stride가 크면 모델의 계산 비용은 줄어들지만, 해상도가 떨어져 세부 정보를 놓칠 수 있다.
- 반면 Output Stride가 작으면 해상도가 향상되지만 계산 비용이 증가한다.
- 이러한 특성 때문에 Output Stride는 특히 이미지 분할(Image Segmentation) 같은 작업에서 중요한 개념이 된다.
- MF는 "Multiply-Accumulate Operation (MACs)" 혹은 "Million Flops"의 약자
- mIOU는 "mean Intersection over Union"을 나타내며, 세그멘테이션 성능을 평가하는 주요 지표다
[reference]
https://arxiv.org/abs/1801.04381
Comment