
서론
이 장에서는 지금까지 쿠버네티스가 어떻게 발전해 왔는지에 대해서 설명한다.
History of Kubernetes
- 초기 쿠버네티스는 Docker Engine을 직접 호출해서 컨테이너를 실행시켰다.
- 도커 이외의 다수의 컨테이너 런타임을 지원하기 위해 CRI(Container Runtime Interface)가 등장하면서 쿠버네티스는 CRI를 통해 컨테이너 오케스트레이션이 가능해졌다.
- 하지만 도커 엔진은 자체적인 고유 API를 사용했기 때문에 쿠버네티스가 설계한 CRI와 호환되지 않았다.
- 이 문제를 해결하기 위해 쿠버네티스는 도커 엔진을 CRI에 맞추기 위한 어댑터 모듈(Dockershim)을 내장했다.
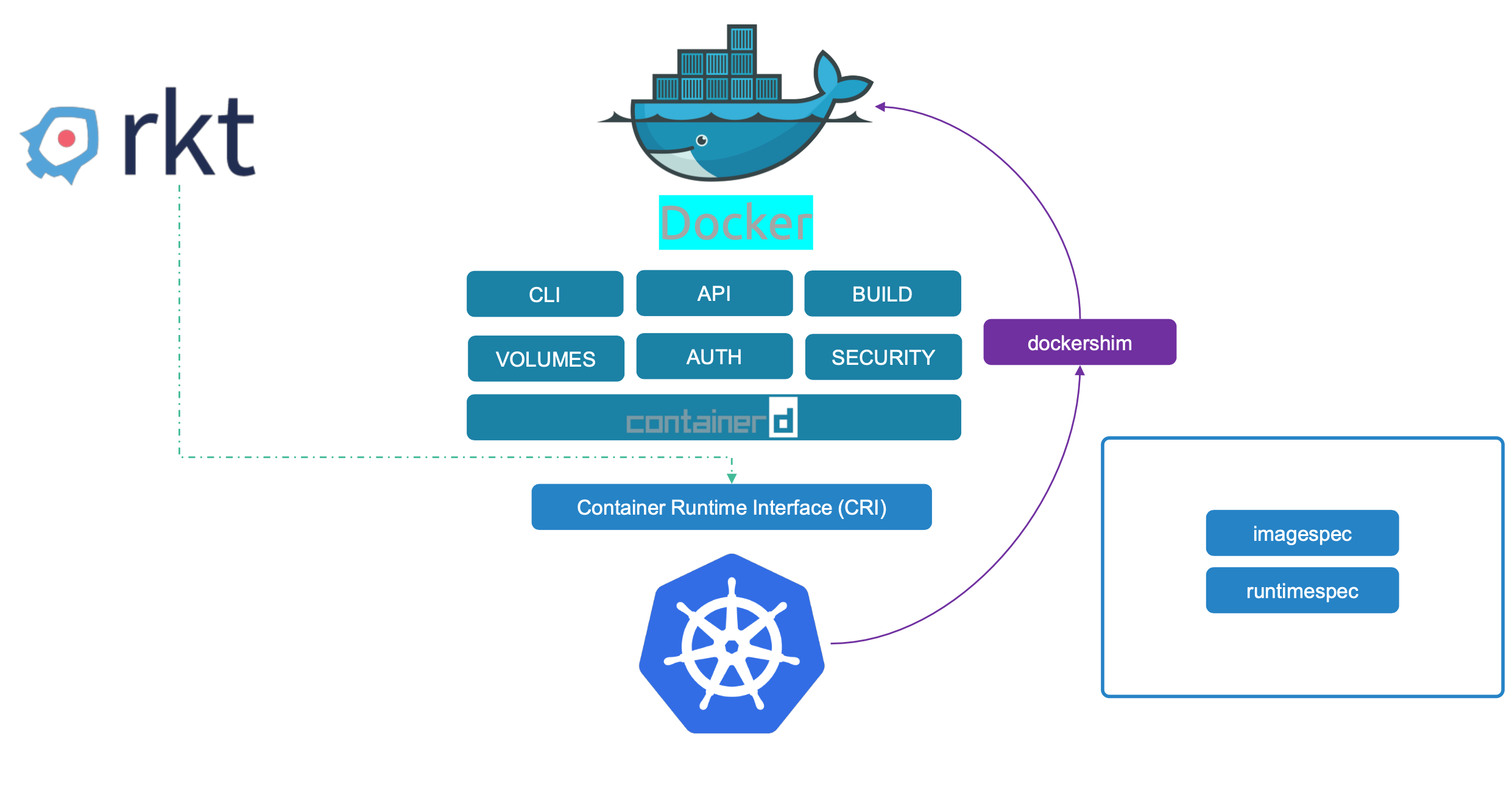
- 이 모듈은 쿠버네티스와 도커 엔진이 통신을 할 때 CRI 명령을 도커 네이티브 API 형식으로 변환하는 번역계층을 수행했다.
쿠버네티스가 CRI 표준을 도입하면서 컨테이너 런타임과의 통신 방식을 재정의했다. 하지만 당시 도커 엔진은 CRI를 지원하지 않았기 때문에, dockershim을 개발한 것이다.
- 그런데 도커 엔진이 업데이트될 때마다 쿠버네티스의 dockershim도 수정해야 했기 때문에 유지보수가 어려웠다.
- 이를 없애기 위해 dockershim 없이 쿠버네티스와 컨테이너 런타임 간 CRI만 쓰고, 런타임 내부에서 OCI Image/Runtime Spec으로 컨테이너를 실행하는 구조로 전환했다.
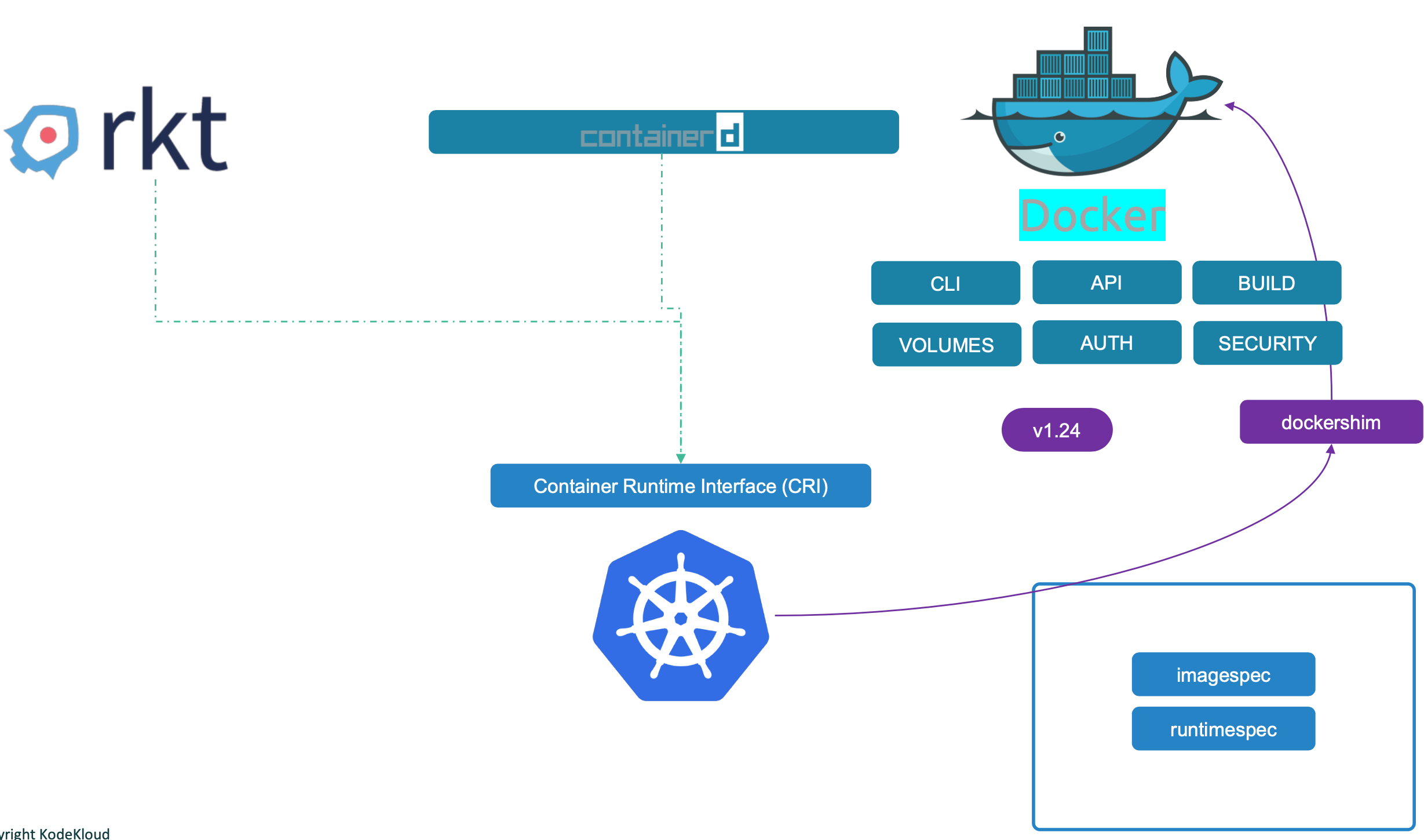
- 다시 말해 containerd · CRI‑O 같은 런타임은 CRI를 구현하면 쿠버네티스와 통신이 가능했고, 자신 안에서는 OCI 표준을 따라 runc 등 저수준 런타임을 호출한다.
- 컨테이너 “런타임”이란?
- Docker Engine: CLI·빌드·이미지 관리·컨테이너 실행 모두 포함한 “종합세트”.
- containerd, CRI-O: 빌드는 빼고 실행(core runtime) 기능에 집중한 경량화 버전.
- Docker Engine = 런타임+@
- containerd/CRI-O = 런타임 코어”
- 컨테이너 “런타임”이란?
- 따라서 1.24 버전 이후에는 dockershim이 완전히 제거되면서 CRI를 직접 구현한 런타임만 지원하는 형태가 확정되었다.
- crictl: CRI 소켓에 붙어 쿠버네티스 시점으로 컨테이너를 들여다보는 디버그 CLI
- crictl은 Kubelet과 동일한 API를 사용해 파드·컨테이너·이미지 정보를 가져옴
- kubectl : 사용자 → API Server 통신용 CLI
- kubelet : API Server → 노드(런타임) 연결 담당 에이전트
- API Server의 지시에 따라 CRI 호출로 컨테이너를 만든다.
- crictl : kubelet과 마찬가지로 CRI를 직접 호출하는 CLI
- crictl은 Kubelet과 동일한 API를 사용해 파드·컨테이너·이미지 정보를 가져옴
- ctr·nerdctl: containerd 소켓에 붙어 containerd를 직접 조종하는 CLI(ctr=저수준, nerdctl=일상용).
- containerd 내부 객체(Task, Snapshot 등) 를 직접 만져야 할 때 사용.
Control Plane(마스터 노드)
쿠버네티스 클러스터의 전반적인 작업을 관리
- Kube-api server: 개발자가 마스터 노드에 어떤 요청을 보내면 이를 받아 실행시켜주는 역할
- etcd: 쿠버네티스 클러스터에 존재하는 worker node들에 대한 상태 정보를 key-value 형태로 저장하는 저장소
- Kube-scheduler: 파드를 실행시킬 노드를 선택
- Kube-Controller-manager: 클러스터 상태를 모니터링
- Pod: 하나의 목적을 위해 구성된 컨테이너를 그룹화한 것
Worker Node
- Kubelet: 모든 워커 노드에 존재하며 워커 노드를 총괄하는 역할
- Kube-proxy: 쿠버네티스의 네트워크 동작을 관리, CNI를 통해 노드에 존재하는 파드들이 쿠버네티스 내부/외부 통신을 가능하도록 함
- Container Runtime Engine: 컨테이너를 실행하는 엔진(Containerd, CRI-O ..)
Comment